Боковые силы, действующие на автомобиль

Управление автомобилем является главной производственной функцией водителя. Основное назначение автотранспортных средств – перемещение грузов и пассажиров в пространстве, поэтому под управляемостью следует понимать целенаправленную организацию процесса движения. При анализе факторов, влияющих на поперечную устойчивость автомобиля, необходимо знать величину поперечной силы, вызывающей занос или опрокидывание автомобиля. В случае движения автомобиля на повороте такой силой является центробежная сила инерции. Для ее определения, рассмотрим схему (рис. 3.1).
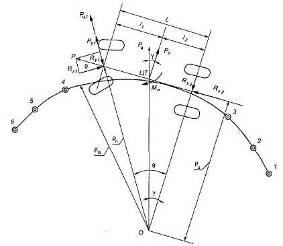
Рисунок 3.1 – Силы, действующие на автомобиль при повороте
Rxi, Rx2, Ryi, Ry2 – продольные и поперечные реакции дороги на колеса переднего и заднего мостов; Ри – центробежная сила; Ру – поперечная составляющая центробежной силы; сц и с3 – радиусы поворота центра масс и задней оси; и – угол поворота управляемой оси (приблизительно равен полусумме углов поворота управляемых колес); Ми – момент инерции автомобиля; г – угол между радиусом сц поворота центра тяжести и продолжением оси заднего моста
Для упрощения расчетов примем следующие допущения: автомобиль является плоской фигурой; движется по горизонтальной дороге; шины в поперечном направлении не деформируются
На участке дороги 1–2 автомобиль движется прямолинейно, и его управляемые колеса находятся в нейтральном положении. На участке 2–3 происходит поворот управляемых колес, и автомобиль движется по кривой переменного радиуса, т.е. по первой переходной кривой. На участке 3–4 положение управляемых колес, повернутых на определенный угол и, остается неизменным, а радиус R траектории движения средней точки задней оси – постоянным. На участке 4–5, т.е. на второй переходной кривой, водитель поворачивает управляемые колеса в обратную сторону, вследствие чего радиус R постепенно увеличивается. На участке 5–6 автомобиль снова движется прямолинейно.
При равномерном движении по дуге постоянного радиуса центробежная сила (Рц) определяется:
![]() (3.1)
(3.1)
где ![]() – полная допустимая масса автомобиля;
– полная допустимая масса автомобиля;
![]() – угловая скорость автомобиля при повороте;
– угловая скорость автомобиля при повороте;
![]() - расстояние от центра поворота до центра тяжести автомобиля.
- расстояние от центра поворота до центра тяжести автомобиля.
Вместе с тем
![]() , (3.2)
, (3.2)
где V – линейная скорость автомобиля.
![]() ; (3.3)
; (3.3)
![]() . (3.4)
. (3.4)
Потеря устойчивости автомобилем особенно опасна при большой скорости, когда движение его близко к прямолинейному. Угол и при этом сравнительно невелик и можно считать, что tg и ≈ и рад.
Таким образом, центробежная сила (Рц), действующая на автомобиль при его равномерном движении, определяется:
 (3.5)
(3.5)
Поперечная составляющая центробежной силы (Ру1) равна:
 (3.6)
(3.6)
При равномерном движении (переходные кривые) на автомобиль действует также сила, вызванная изменением кривизны траектории. Поперечная составляющая (![]() ) этой силы пропорциональна скорости автомобиля и угловой скорости (щук) поворота управляемых колес. Величина этой угловой скорости зависит от скорости движения: чем больше скорость, тем быстрее приходится поворачивать колеса, чтобы вписаться в поворот:
) этой силы пропорциональна скорости автомобиля и угловой скорости (щук) поворота управляемых колес. Величина этой угловой скорости зависит от скорости движения: чем больше скорость, тем быстрее приходится поворачивать колеса, чтобы вписаться в поворот:
Популярные материалы:
Обзор клиентов и конкурентов
Основными клиентами ООО ТК «РегионТранс» являются индивидуальные предприниматели, так как крупные лесозаготовительные комплексы, имеют собственные подвижные составы. В числе конкурентов фигурируют опять же индивидуальные предприниматели, ...
Табель основного и дополнительного оборудования
№
Наименование
Модель, ГОСТ, тип, ТУ
Краткая техническая характеристика
Завод-изготовитель, разработчик
1
Подъемник четырех- стоечный для легковых автомобилей и микроавтобусов
П-178
Тип -электромеханический, ...
Цель разработки и область применения автомобиля
Ford Focus – пятиместный легковой автомобиль малого класса с закрытым несущим пятидверным кузовом типа «хечбек». Устанавливается инжекторный двигатель с рабочим объемом 1,4 л.
Предназначен для эксплуатации при температуре окружающего воз ...
