Зарубежные модели

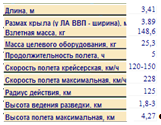
RQ-7A "Shadow 200"
Данный БЛА относится к среднему классу тактических беспилотников и предназначен для наблюдения, разведки и целеуказания.
Особенности: моноплан с высокорасположенным крылом и хвостовым оперением на двойной балке. В конструкции широко используются композиционные материалы. Система взлета/посадки – автоматическая. Способ управления полетом – полет по программе с контролем параметров полета и возможностью оперативной корректировки программы в полете.
Координаты местоположения корректируются по информации приемника GPS. Силовая установка - поршневой двигатель UEL AR741 208cc 38 л.с. Способ взлета: по самолетному (10 м), катапульта, RATO; способ посадки: по самолетному с тормозным крюком, сеть.

RQ-7A "Shadow 200"
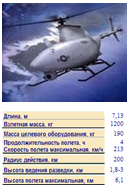
RQ-8А "Fire Scout"
Назначение: наблюдение, разведка, целеуказание, обеспечение связи и передачи данных, РЭБ, РХБР, РТР, ПСС
Особенности: конструктивно представляет собой модифицированный вариант вертолета Model 330 SP Фирмы «Schweizer» с уменьшенным за счет отсутствия экипажа фезюляжем, новой топливной системой и бортовым оборудованием. Несущий винт – трехлопастный. Система взлета/посадки – автоматическая, система посадки CARS c точностью 15 см. Способ управления полетом – полет по программе. Силовая установка - ТВД мощностью 420 л.с. Способ взлета/посадки – вертикальный.

Фирма «Ханиуэлл» в рамках финансируемой программы «Перспективная боевая техника» разработала беспилотную систему на базе мини-БЛА вертикального взлета и посадки RQ-16 «Мав». Она рассматривается в качестве средства разведывательного обеспечения действий подразделений в звене взвод/рота. Аппарат, выполненный по схеме «винт в кольце», а также компактная наземная станция управления размешаются в специальных контейнерах и могут переноситься одним военнослужащим. В состав бортового оборудования БЛА, размещаемого в двух цилиндрических обтекателях, входит система управления аппаратом, приемник космической радионавигационной системы NAVSTAR, телевизионная и инфракрасная камеры, а также аппаратура передачи развединформации на дальность до 10 км. Система прошла успешные испытания на территории США, в ходе которых, в частности, отрабатывалась возможность передачи видеоизображения с БЛА на борт ударного вертолета АН-64 «Апач». Благодаря высокому уровню автоматизации машина проста в управлении, а время обучения оператора ее эксплуатации составляет около 16 ч.
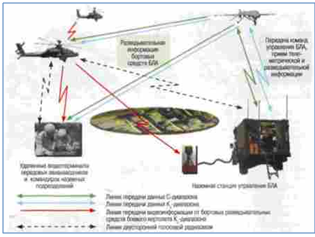
Рис. 1.3 Концепция совместного применения боевых вертолетов и БЛА
В целях обеспечения возможности доведения разведданных от беспилотных машин непосредственно ударным средствам и командирам наземных подразделений разрабатываются удаленные терминалы приема видеоинформации «Ровер». Они позволяют получать в реальном масштабе времени видеоизображение цели от оптоэлектронных средств разведки БЛА и вести двусторонний обмен данными с отображением на дисплеях, назначенных для поражения объектов.
В целом анализ опыта применения вооруженными силами США беспилотных систем различных классов подтверждает высокую эффективность этого вида вооружения в условиях современных военных действий любой интенсивности. Дальнейшее совершенствование этих систем осуществляется путем улучшения тактико-технических характеристик их наземных и воздушных компонентов, а также благодаря совершенствованию способов применения БЛА как самостоятельно, так и во взаимодействии с пилотируемыми летательными аппаратами. По мнению военных экспертов, несмотря на достаточно серьезные проблемы, связанные с применением БЛА (например, ограничения систем связи по передаче сигналов управления и развединформации, сложность интеграции в единую систему управления воздушным движением и др.), количество БЛА в войсках, а также круг решаемых ими задач будут неуклонно возрастать.
Популярные материалы:
Изучение требований безопасности к технологическому процессу и оборудованию
депо автосцепной ремонт неисправность
Во избежание случаев травматизма, повреждения инструмента, оборудования запрещается находиться на рабочих местах, производственных помещениях, территории депо в состоянии алкогольного, наркотического ...
Тяговый расчет автомобиля
Тяговая характеристика автомобиля представляет собой зависимость между силой тяги (, Н) и скоростью(, км/ч) движения автомобиля.
Силу тяги() на ведущих колесах автомобиля рассчитывают по формуле:
(2.3)
где:- крутящий момент двигателя, ...
Расчет увеличения осадки судна от крена, изменения плотности воды,
проседания на мелководье и расчет безопасной ширины фарватера
І. Танкер длиной L = 174 м, шириной В = 23,5 м со статической осадкой Тсm = 9,8 м на ровном киле следует со скоростью V = 14 уз (7,2 м/с) на мелководье, Hгл = 14,8 м.
Определить суммарное увеличение осадки от крена судна θ = 3º ...
