Зависимость параметров двигателя от скольжения

ЭДС обмотки ротора, частота этой ЭДС зависят от скорости движения проводов обмотки ротора относительно магнитного поля статора наибольшие значения ЭДС и частоты состоит при неподвижном ( заторможенным ) роторе и подключены к трехфазной сети обмотки статора. Эти величины обозначим следующим образом.
Активное и индуктивное сопротивление ротора обозначим. При вращающемся роторе ЭДС, частота пропорциональна скольжению.
![]()
Активное сопротивление от частоты не зависит.
![]()
Индуктивное сопротивление зависит от частоты.
![]()
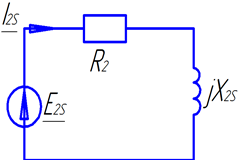
В каждую фазу обмотки ротора можно представить следующей схемой замещения.
Действующее значение тока можно определить из значения Ома.
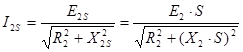
Таким образом параметры двигателя зависят от скольжения.
 S
S
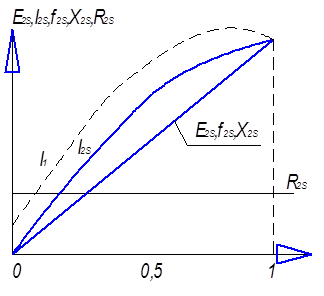
Ток в обмотке статора пропорционален току в обмотке ротора. В режиме холостого хода (S=0) в обмотке статора имеется небольшой ток ротора. Электромагнитный вращающий момент есть результат взаимодействия тока обмотки ротора и магнитного потока создаваемого обмоткой ротора.
![]()
Учитывая, что ток переменный.
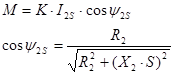
![]() ; где
; где ![]() -сдвиг фаз между током и ЭДС обмотки ротора. При постоянстве напряжения трехфазной сети магнитный поток постоянен.
-сдвиг фаз между током и ЭДС обмотки ротора. При постоянстве напряжения трехфазной сети магнитный поток постоянен.
Поэтому электромагнитный момент.
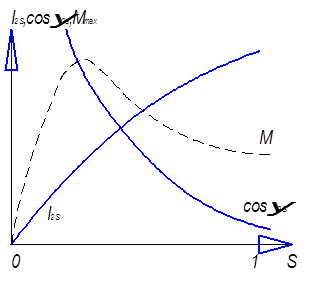
Чтобы получить зависимость момента от скольжения необходимо перемножить ординаты этих кривых.
Популярные материалы:
Расчет модернизированной крыши на прочность и
устойчивость. Анализ результатов
Предел текучести для стали Ст3СП ГОСТ 16523-97 при толщине листов до 10 мм принимается: [σ]т = 255 МПа
Для первого расчетного режима при действие двух сил по 1 кН каждая, приложенных на площадке 0,25х0,25 м и приложенных на расстоян ...
Размещение и расчет пунктов подготовки
вагонов к перевозкам
В соответствии с заданием на отделении дороги имеется одна станция массовой погрузки и среднесуточная погрузка на ней составляет Rп = 400 вагонов, что значительно меньше среднесуточной потребности подготовки вагонов к перевозкам Rпп=546. ...
Расчет площади территории СТО
Нужна площадь территории определяется из выражения, м2:
, (5.33)
м2.
Результаты расчета площадей СТО сведено в табл. 5.24.
Таблица 5.24 — Результаты расчета площадей СТО
Назначение помещения
Площадь, м2
Административно-бы ...
